# Types of AI Agents
In artificial intelligence, an *agent* is any entity that perceives its environment and acts on it to achieve certain goals. Based on their level of intelligence and adaptation capabilities, agents are classified into distinct types. Below, we explore these types in detail, outlining their unique characteristics, mechanisms, and practical applications.
Types of AI Agents
### 1. Simple Reflex Agents
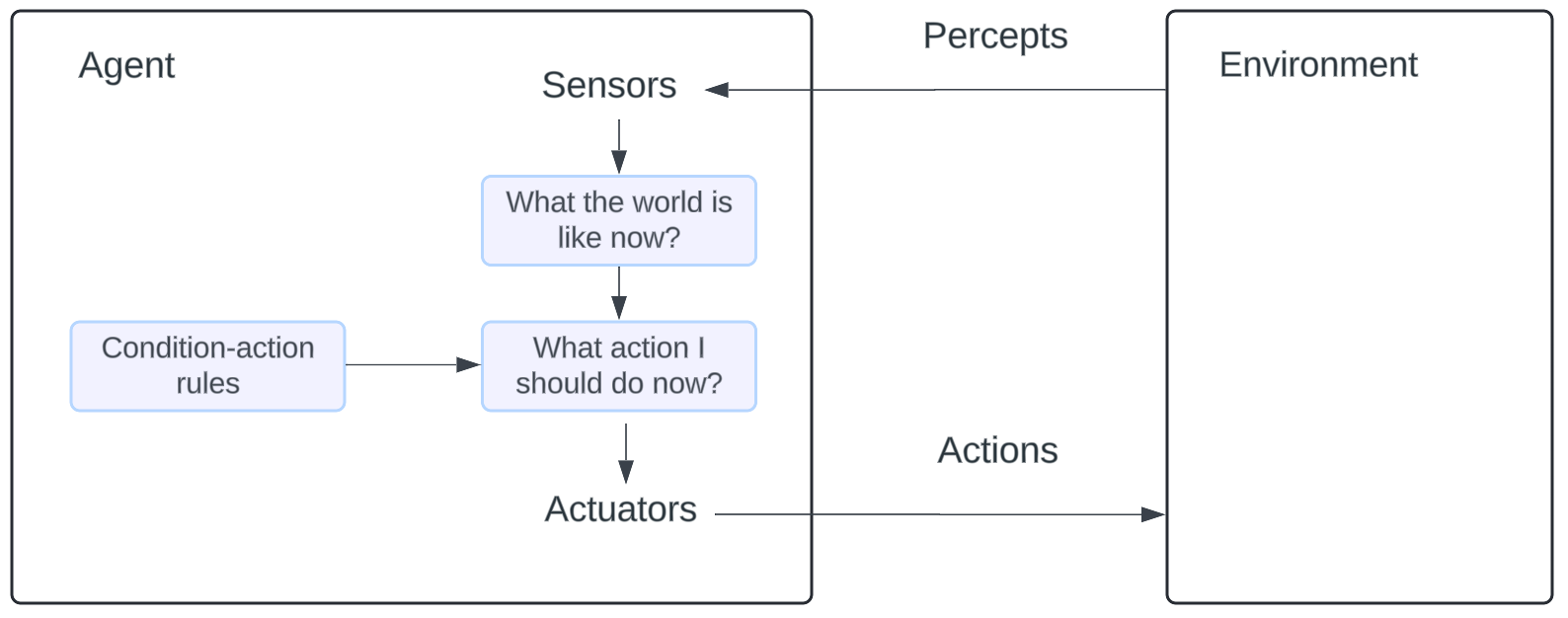
Simple reflex agents are the most basic form of AI agents. They rely entirely on current environmental conditions to decide their actions, without considering any history or future goals. These agents function with a set of *condition-action rules*, where a specific percept triggers a predetermined response. This type of agent is effective for environments that are fully observable and predictable, where specific actions consistently lead to successful outcomes.
Simple Reflex Agents
**Characteristics**:
* Operates based on a set of predefined rules.
* No memory or consideration of past events.
* Inefficient in complex or dynamic environments due to lack of adaptability.
**Examples**:
* Light sensors that turn on a light in response to darkness.
* Basic automated doors that open when movement is detected.
**Problems**:
* **Limited Adaptability**: Since simple reflex agents operate based solely on current percepts, they fail in environments that require flexibility or adaptation. They cannot learn from past experiences or adjust to new patterns.
* **No Memory or History**: Without memory, these agents cannot understand complex situations that require context. They often react to the same trigger without recognizing whether it’s beneficial in every context.
* **Lack of Long-Term Planning**: These agents focus on immediate actions and lack the ability to strategize for future situations. This makes them unsuitable for tasks requiring foresight or sequential planning.
*Example Problem:* A simple reflex agent in a robotic vacuum may get stuck in the same corner repeatedly because it does not remember past movements.
### 2. Model-Based Reflex Agents
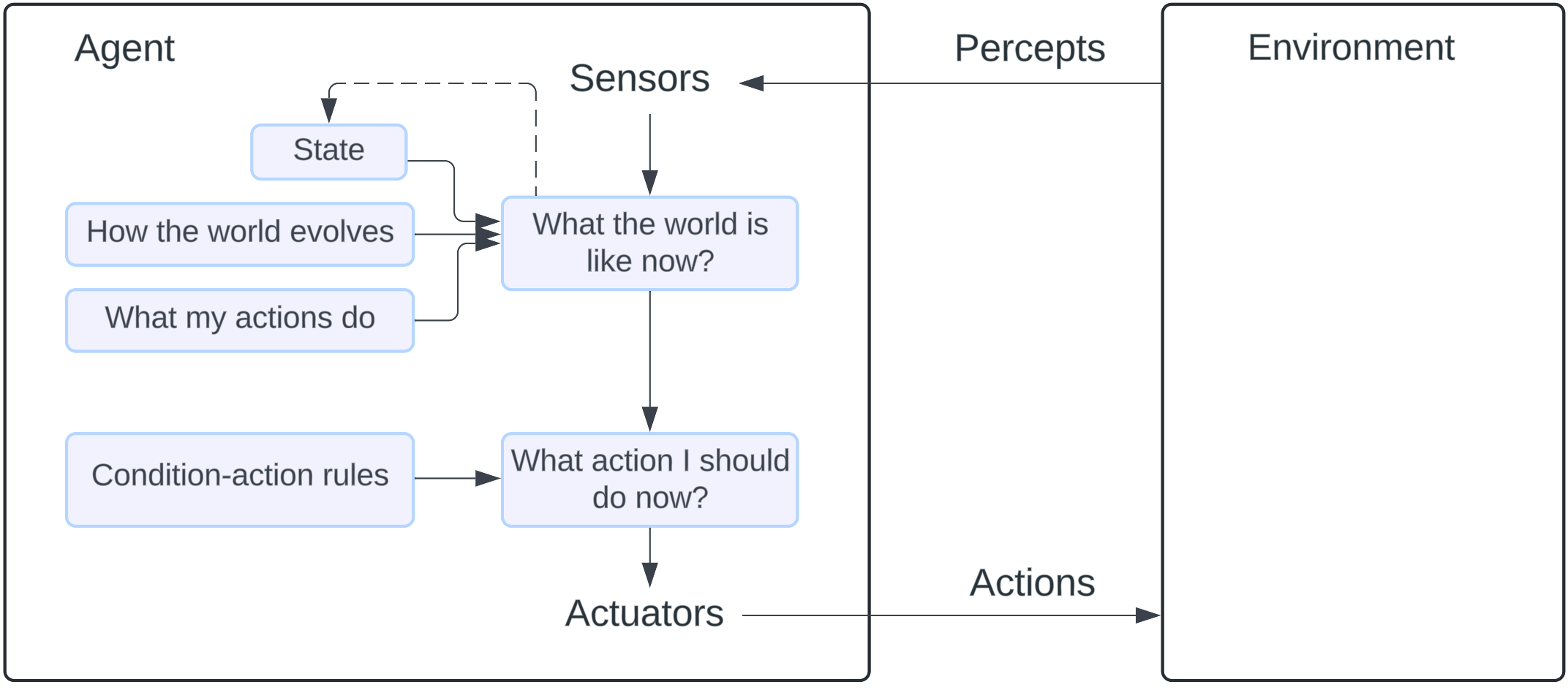
Model-based reflex agents address the limitations of simple reflex agents by incorporating an internal *model of the world*. This model allows the agent to keep track of past states and understand how actions affect the environment over time. By using this history, the agent can handle partially observable environments, where current percepts alone do not provide a full understanding of the world.
Model-Based Reflex Agents
**Characteristics**:
* Maintains an internal model of the environment, or “world state.”
* Capable of memory and tracking changes over time.
* Useful in environments where conditions may change or are partially observable.
**Examples**:
* Self-correcting thermostats that learn from recent temperature adjustments to provide better comfort.
* Robotic vacuum cleaners that remember obstacle locations to avoid collisions.
**Problems**:
* **Complexity in Maintaining the Model**: Keeping an accurate model of the environment, especially in dynamic settings, is challenging. If the model becomes inaccurate, the agent’s decisions suffer.
* **Limited Ability to Predict Future States**: While the model adds memory, it doesn’t enable prediction of future states unless combined with additional algorithms, making it limited in complex or unpredictable scenarios.
* **Resource Intensity**: Building and updating the model demands computational resources, which can be prohibitive in large, real-world environments with constantly changing variables.
*Example Problem:* A model-based agent in a self-driving car may struggle if its model of the road conditions becomes outdated due to sudden changes, like unexpected construction zones.
### 3. Goal-Based Agents
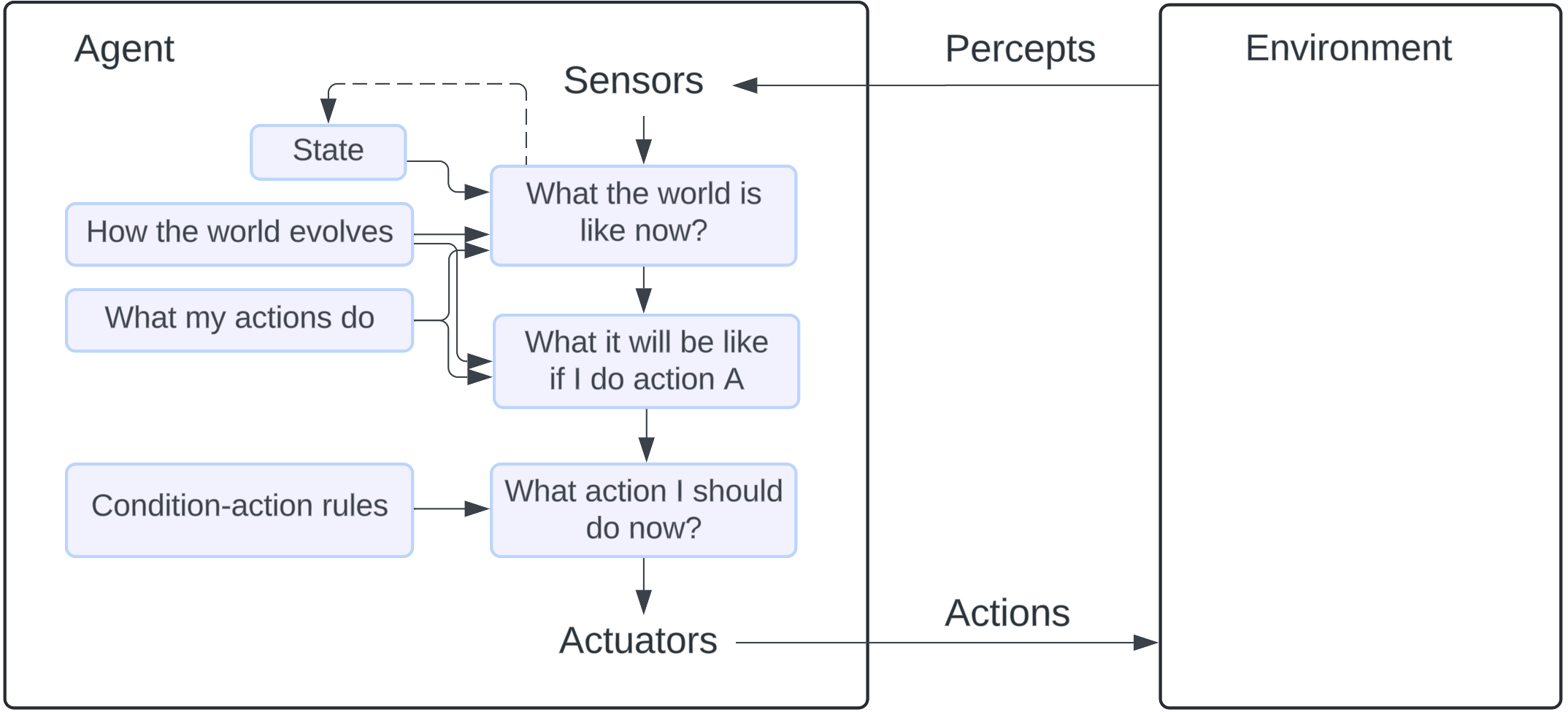
Goal-based agents advance further by incorporating goals to drive their behavior. Instead of merely reacting to current conditions, these agents assess actions based on their potential to achieve specific objectives. Goal-based agents require more computation, as they must evaluate different options and predict which actions will bring them closer to their goals.
Goal-Based Agents
**Characteristics**:
* Guided by long-term goals, enabling flexibility in decision-making.
* Requires algorithms to plan and choose actions that meet objectives.
* Useful for situations where objectives need to be met through a sequence of actions.
**Examples**:
* Autonomous delivery robots navigating to specified locations.
* Route planning applications that determine the best path to reach a destination.
**Problems**:
* **Difficulty in Setting and Prioritizing Goals**: Determining the right goals and evaluating conflicting objectives can be complex, especially in multi-goal scenarios.
* **High Computational Demand for Planning**: Goal-based agents require significant processing power to simulate and evaluate possible actions against the set goals, which can slow down decision-making.
* **Inflexibility to Goal Changes**: When goals change dynamically, adapting may require recalibrating the entire system. This can lead to inefficiencies or unintended actions if not handled properly.
*Example Problem:* A goal-based agent in a delivery robot might encounter issues when road conditions change unexpectedly, forcing it to constantly re-evaluate and reroute.
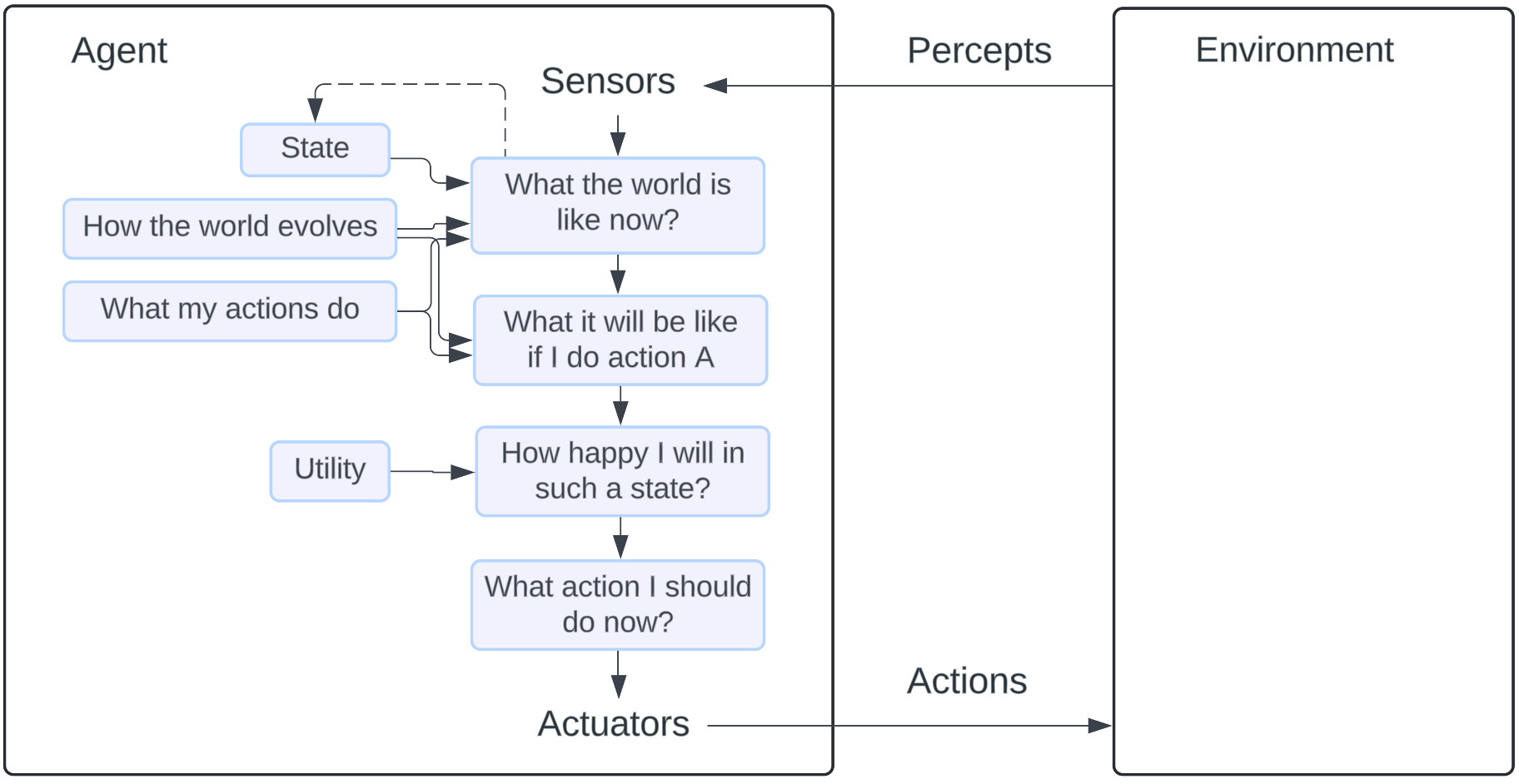
### 4. Utility-Based Agents
Utility-based agents consider not just the achievement of goals but also the *quality* of those achievements. They use *utility functions* to assign values to different actions or outcomes, thereby selecting the actions that maximize utility or satisfaction. Utility-based agents are particularly useful when there are multiple potential paths to reach a goal, but some paths are better than others.
Utility-Based Agents
**Characteristics**:
* Calculates the best possible actions based on assigned utility values.
* Seeks to optimize overall performance or quality of outcome.
* Ideal for complex decisions with multiple possible actions and varying outcomes.
**Examples**:
* E-commerce recommendation systems that maximize user satisfaction by suggesting personalized products.
* Autonomous vehicles that calculate optimal routes based on traffic conditions, fuel efficiency, and safety.
**Problems**:
* **Complexity in Designing Utility Functions**: It’s difficult to define utility functions that balance all desired outcomes. A poorly designed utility function may cause unintended behavior, like favoring one factor (e.g., speed) over another (e.g., safety).
* **Increased Computational Requirements**: Calculating utilities and comparing them can be computationally expensive, especially as the number of actions and variables increases.
* **Overfitting to Specific Conditions**: Utility-based agents may perform well in training conditions but struggle in real-world applications where unexpected factors can make utility calculations less accurate.
*Example Problem:* A utility-based agent in an autonomous vehicle might prioritize reaching a destination quickly but fail to consider all potential safety factors, leading to risky driving decisions.
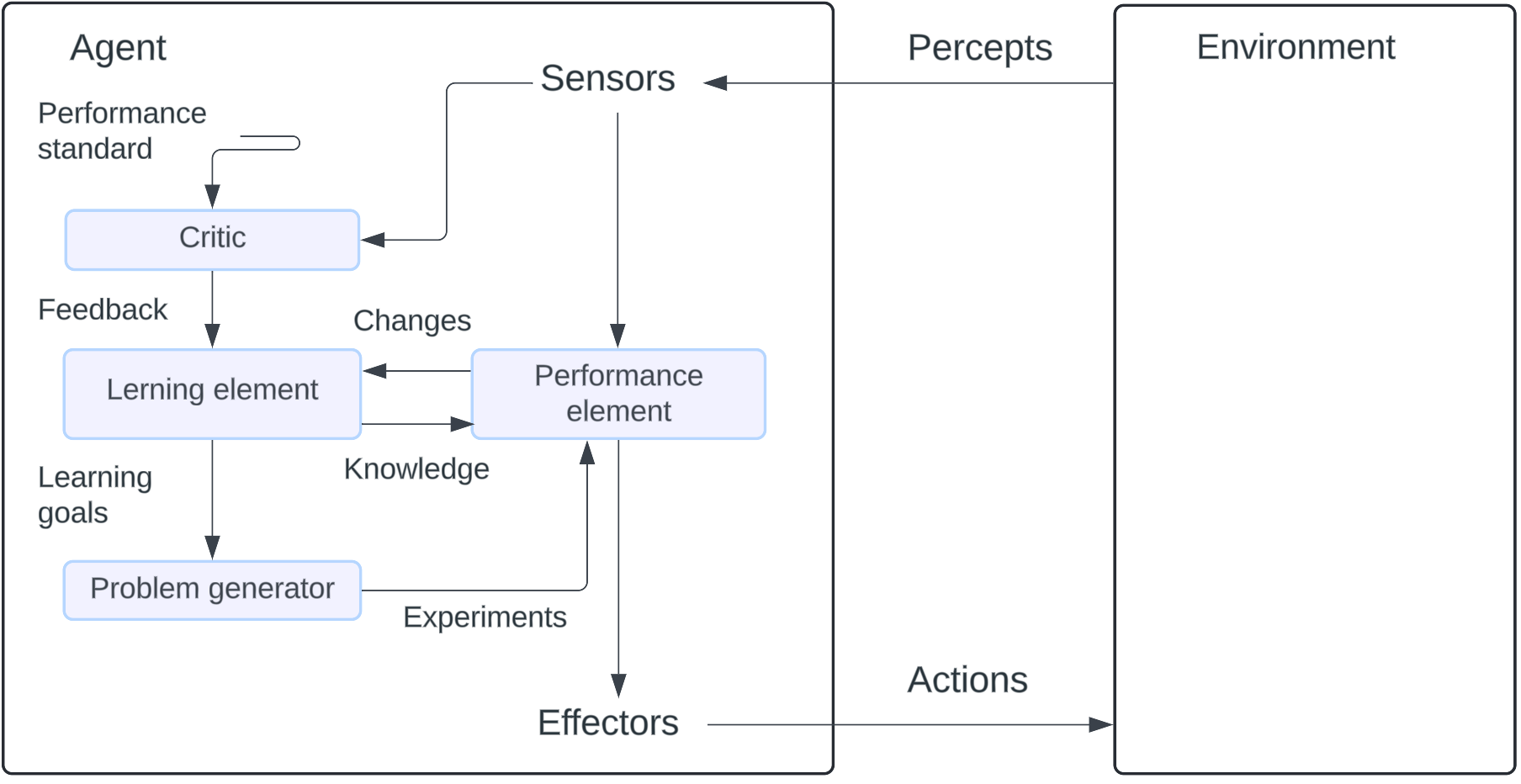
### 5. Learning Agents
Learning agents are equipped with mechanisms to *learn from experience*. They possess components like learning elements and performance elements that allow them to adapt to new situations, improving their decision-making capabilities over time. These agents can explore new actions, receive feedback, and modify their strategies based on the feedback received, making them highly adaptable.
Learning Agents
**Characteristics**:
* Adapts behavior based on past interactions and feedback.
* Incorporates learning algorithms to improve accuracy and effectiveness.
* Suitable for dynamic environments where conditions and requirements change frequently.
**Examples**:
* Chatbots that learn from user interactions to improve response accuracy.
* Adaptive cybersecurity systems that learn from new threats to better protect against attacks.
**Problems**:
* **Risk of Overfitting or Underfitting**: Learning agents may overfit to specific scenarios or underfit if not trained adequately. This can lead to poor performance when facing new or varied conditions.
* **Difficulty in Handling Negative or Inconsistent Feedback**: Learning agents may struggle in environments where feedback is infrequent or contradictory, making it hard for them to adjust correctly.
* **High Resource and Time Requirements for Training**: Learning takes time and computational resources, making it challenging to implement in resource-constrained settings or for real-time decision-making.
*Example Problem:* A learning agent in a customer service chatbot might learn from user interactions but may become biased or overly rigid if it overfits to repetitive requests.
### 6. Multi-Agent Systems
Multi-agent systems involve multiple agents interacting within a shared environment, either collaborating or competing with one another to achieve their respective goals. Each agent in a multi-agent system may have unique goals or tasks, but they coordinate or compete in a way that collectively enhances the overall system’s functionality. These systems are commonly used for tasks that benefit from distributed problem-solving.
**Characteristics**:
* Involves multiple agents working in parallel.
* Supports both collaboration and competition.
* Suitable for complex systems requiring distributed control and decision-making.
**Examples**:
* Smart grid systems with multiple energy-distribution agents balancing supply and demand.
* Autonomous drones working in teams for search and rescue operations.
**Problems**:
* **Coordination and Communication Issues**: With multiple agents, coordinating actions and ensuring effective communication can be challenging. Poor communication may lead to conflicting actions.
* **Resource Competition**: In environments with limited resources, agents may compete for the same resources, causing inefficiency or deadlock situations.
* **Complexity in Designing Collaborative Strategies**: Creating strategies that allow multiple agents to cooperate effectively is difficult, particularly when agents have different or conflicting goals.
*Example Problem:* In a warehouse, multiple autonomous robots may get in each other’s way if coordination fails, resulting in delays or collisions.
### 7. Hierarchical Agents
Hierarchical agents operate with a layered structure, where goals and actions are prioritized at various levels. This type of agent architecture is particularly useful for breaking down complex tasks into smaller, manageable subtasks, each handled by different layers of the hierarchy. Such agents enable efficient task management, as they can focus on high-level goals while delegating simpler tasks to lower levels.
**Characteristics**:
* Organized in levels, with high-level and low-level decision-making layers.
* Suitable for complex systems requiring division of labor and priority management.
* Allows efficient handling of tasks with varying degrees of complexity.
**Examples**:
* Industrial robots with a high-level agent for managing production goals and lower-level agents for handling specific assembly tasks.
* AI in autonomous vehicles where high-level agents plan routes and low-level agents manage steering and braking.
**Problems**:
* **Complex Hierarchical Structure**: Designing and maintaining a clear hierarchy in agent behaviors and decision-making can be challenging, especially in highly dynamic environments.
* **Inflexibility at Lower Levels**: Lower levels of a hierarchy may lack the autonomy to adapt when encountering unexpected situations, leading to delays while waiting for higher-level guidance.
* **Increased Computation and Communication Overhead**: The hierarchical structure requires constant communication between layers, which can lead to latency or computational overload, especially with large hierarchies.
*Example Problem:* A hierarchical agent managing a manufacturing process may encounter bottlenecks if lower-level agents have to wait for top-level decisions during urgent situations.
### Conclusion
Each of these agent types has specific applications depending on the requirements of the environment and tasks at hand. Simple reflex agents are effective for straightforward, predictable scenarios, while goal-based, utility-based, and learning agents offer advanced capabilities suitable for complex, dynamic environments. In large systems, multi-agent and hierarchical approaches enable distributed problem-solving and effective task prioritization, making AI adaptable across a vast range of applications.